SHIPS/TECH
DPS
DPSとは?
オフショアエンジニアリングが運航する海洋調査作業船群には、Kongsberg K-PosというDynamic Positioning System(DPS)が装備されています。このシステムにより、船舶の推進器はコンピューターを使用して統合的に制御され、船舶の位置保持と方位保持が可能となります。
目標船位と目標方位はDPオペレーターによって設定され、DPSは船位計測のための位置検出装置(DGNSSやレーザー測位等)と方位計測のためのジャイロコンパスからのデータを基にこれらの偏差を自動的に検出し、各推進器の出力を自動制御して適切に調整し続けます。
( 4つのオペレーションモード )
DPSには以下のようなオペレーションモードがあり、作業内容によって適切なモードを選択することができます。
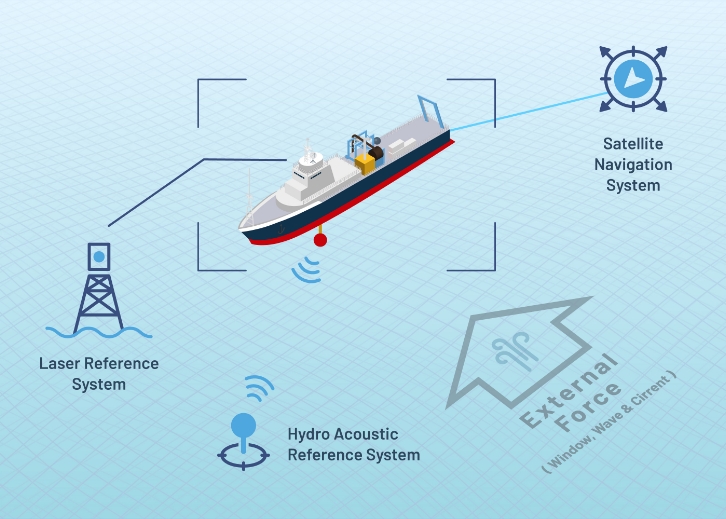
Auto Position Mode
定点保持
船舶を一定点に保持し続ける機能です。
船位を保持したまま方位を変更したり、方位を保持したまま船位を変更することができます。
変更する際の移動速度や回頭角速度、回頭中心点を任意に細かく設定することもできます。
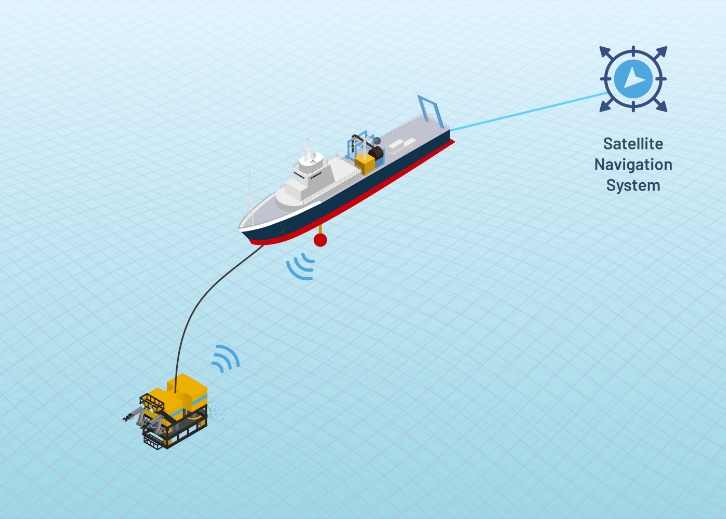
Follow Target Mode
自動追従
ROVなどの水中移動体にトランスポンダーを搭載することにより、この動きに船舶を自動追従させることができます。

Auto Track Mode
トラック自動航行
事前に用意したルートトラック上を、設定した一定の速度で、船舶の任意の点が高精度にトレースするように操船することができ、ケーブル敷設作業などに使用されます。
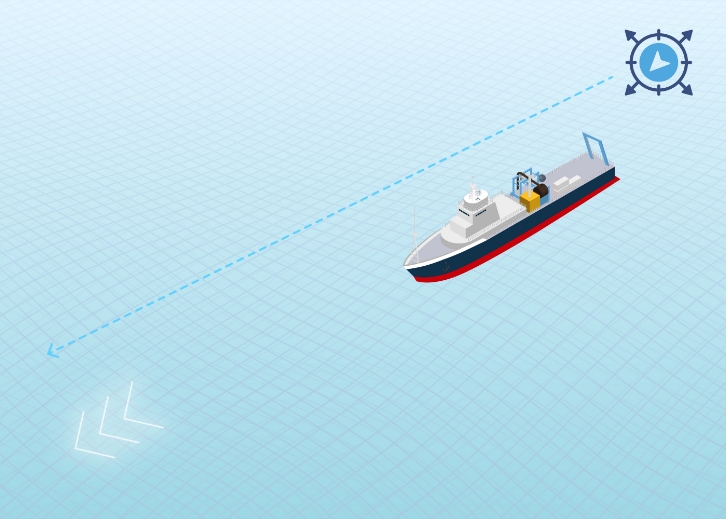
Auto Pilot Mode
自動航行
一般的に船舶で使用されるAuto Pilot機能と同様に、方位を維持して航行することができます。



_002.jpg)
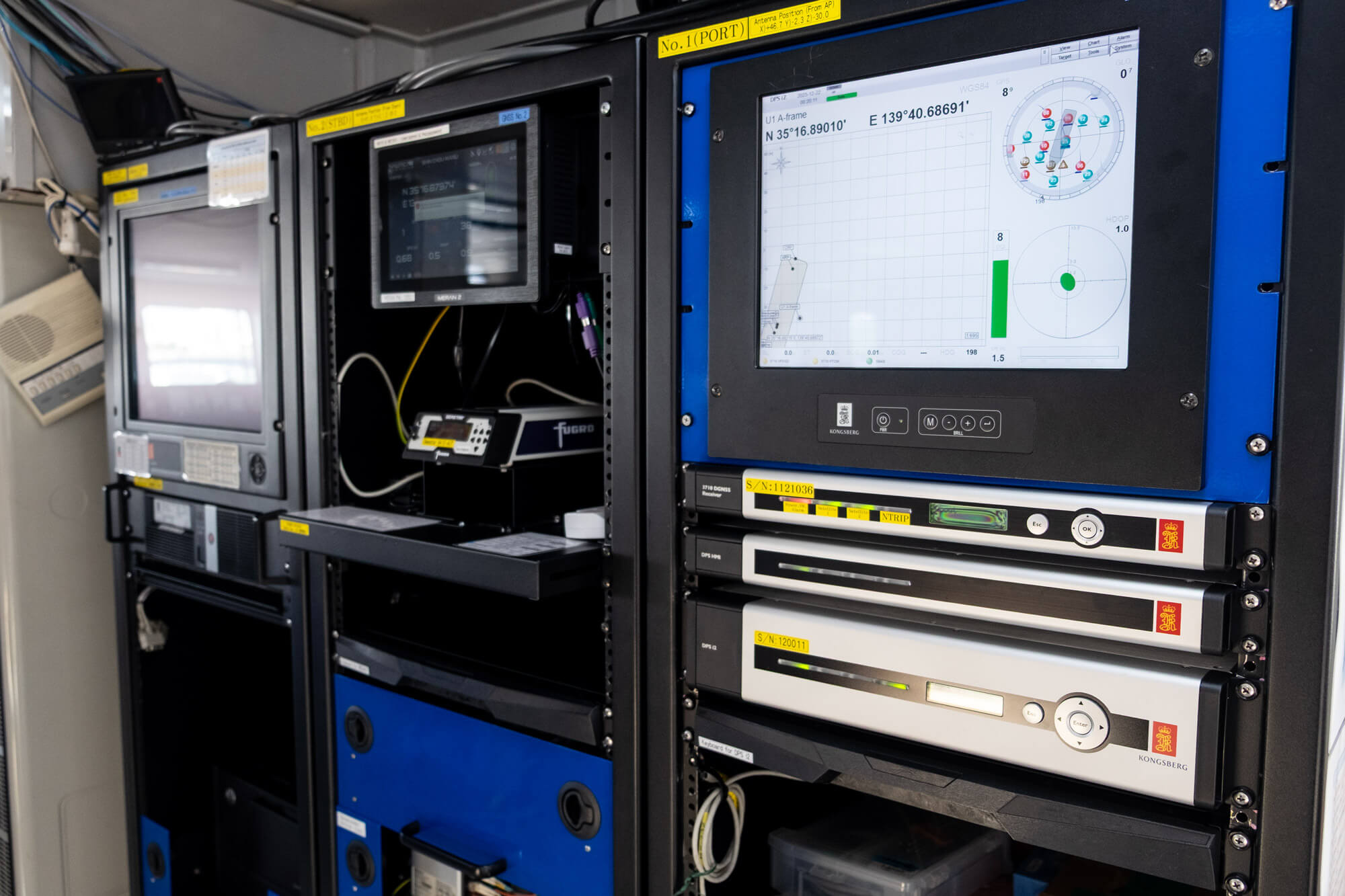
DPS関連機器
DPSは、船体6運動のうちSurge、Sway、Yawを自動制御し、復元力をもつRoll、Pitch、Heaveはセンサーによって監視し続けます。
DPSによって、船舶は風浪や海潮流に対抗して一定点に留まること(定点保持)が可能となり、錨を使用した係留ができない大水深海域での調査作業に適応できるものとなります。
また、水中音響測位装置(HiPAP)により、水中にあるトランスポンダーの位置を継続的に計測することができ、トランスポンダーをROVに搭載した場合、DPSはこのトランスポンダー位置を基にROVの動きに船舶を自動追従させることができます。
トランスポンダーを海底の一定点に設置した場合、DPSはこのトランスポンダー位置を基準点として船舶の位置を定点保持することができます。
DPSシステムは無停電電源装置(UPS)を持ち、DPS関係の各機器にバッテリーによる非常電源と安定化電源を供給しています。


_009_xxx.jpg)
_006.jpg)
DPSに関係する計測器
位置検出装置やジャイロコンパスの他に、風を計測する風向風速計と船体の姿勢を計測するMotion Reference System(MRU)もDPSの一部として組み込まれており、船体の風圧抵抗や船体動揺による位置変化も随時測定され計算されます。
DPS Class2
安全にDPSを使用した調査作業を行うため、船舶に与えられる任務によって、冗長性を持つDPS Class2が装備された船舶が使用されます。これはシステム上の何れか一つの機器やケーブル、管、ネットワーク等に障害が発生しても、DPSはその能力を完全に失うことがないように設計されたシステムです。この機能は定期的に検証され維持されます。
DPS Class2では、推進器への電力供給を管理するPower Management System(PMS)が装備され、出力過大によるブラックアウトの発生を防止します。




DPオペレーター
DPSを操作するオペレーターを、「DP Operator(DPO)」といいます。
DPOはDPオペレーション中、船舶の作業が安全に継続できることを監視し続け、刻々と変化する気象や海象を観測して状況を把握し、使用しているスラスター出力やDP関連機器の状態によっては船舶の位置や方位を調整する役割があります。
また、DPOは作業内容と気象海象状況、機器の状態によって作業を継続するか中断する議論に参加し、オペレーションを終了するまで安全にDPを運用する役割があります。


SHIPS/TECH 船舶・技術
